
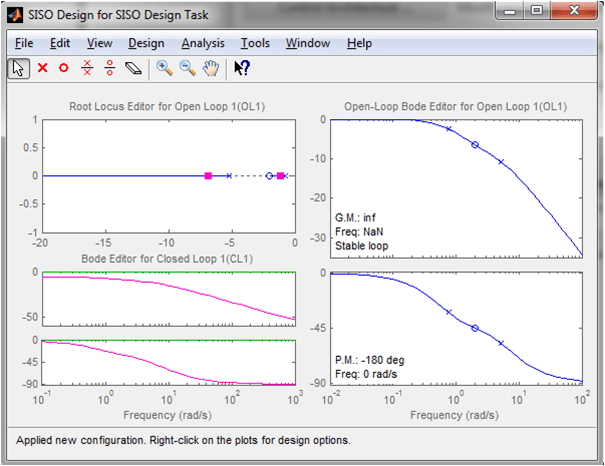
There are few methods to do control tuning in Matlab. One of these is control tuning using root locus editor in Matlab SISO feature. Unlike control tuning using Simulink which is automated, control tuning using root locus editor in Matlab is a manual tuning. On below figure, the upper left box is the root locus editor where you tune your controller. When you zoom in the small pink dots; these will split up and then you can move them to get your desired system requirement. The lower left sections are the gain and phase margin for the close loop system. On the other hand the right sections are the open loop gain and phase margins. The close loop and open loop gain and phase margins will react with respect to the root locus adjustment.

Control Tuning using Root Locus Editor in Matlab – Step by Step Procedure
Step 1: Prepare the Plant Transfer Function
Let us begin the control tuning using root locus editor in Matlab by encoding the plant transfer function in the Matlab command window. Before you can do this, you need to derive first your plant transfer function. Once you already derive the plant transfer function, you can encoding it on Matalb command window. Start by declaring the numerator and denominator of the plant transfer function as below

Right after, get the transfer function using below command.

Our plant transfer function is assigned to variable Gc. We will load this later.
You will not need this procedure if you have a MAT file to load. We will discuss this the proceeding steps.
Step 2: Load SISO Tool Windows
The root locus editor is under sisotool. To start the sisotool, simply type below command in the command window.
>>sisotool
Then there are two windows that will pop up; “Control and Estimation Tools Manager” and “SISO Design for SISO Design Task”.

Step 3: Select Control Architecture
One of the very important things to note in control tuning using root locus editor in Matlab is the selection of the control architecture. Under “Control and Estimation Tools Manger” window, click on the “Architecture” tab then click on “Control Architecture”.

Below window will appear.

On the above window you can select the control architecture you want. In this demonstration let us use the top most structure. H is the feedback gain. If your feedback has a gain, you need to include it here. The default value for this is 1 which is a direct feedback. On the other hand F is the filter gain. You may include this if you have filter gain. The default value is one. In this demo, the default values are used.
C and G are the controller and the plant respectively. Do not forget to set the sign of S1 to -1. This means that we are using a negative feedback. After all the settings are made, click OK.
Step 4: Import the Plant
In the “SISO Design for SISO Design Task”, import the plant transfer function. This window is empty if you did not imported a plant transfer function yet.

After clicking import, below window will show up.

Highlight “G” and click browse.

After clicking browse, another window will pop up.

Ensure that in above window under “Import model for” G is selected. Under “Available Models”, highlight Gc and then click import then close. You make sure that you selected “Workspace”.
Once the Gc is successfully imported, the value of “G” in System Data window should be “Gc” already. Click OK then.

As mentioned earlier, you may not get your plant transfer function from the workspace but instead import a MAT file. If you have the MAT file, you don’t need steps 1 to 3. To load a MAT file, on the “Model Import” window tick “MAT File” instead of “Workspace”.

After the import process is successfully done, the “SISO Design for SISO Design Task” window is not anymore empty as below.

Step 5: Start the Root Locus Tuning
Once the plant transfer function is already loaded, you are now ready to do tuning. As mentioned earlier, control tuning using root locus editor in Matlab is a manual method. To start tuning, zoom in the small pink dots or box until it splits up. To zoom in, click the magnifying lens icon (+) as highlighted below.

If the root locus cannot be adjusted anymore to meet the target, right click on it and add poles or zero or an integrator. Then re-position again the small pink squares.
To know the close loop gain margin, see the lower left section.

Step 6: View the Output
If you’re done tuning, you can check the output. Under “Analysis“ tab you can select simulation.

Say for instance you are going to select close loop bode, below window will show up.

For more options, right click on the bode diagram plot area. Let us say you want to know the minimum stability margins, right click then under “Characteristics” select “Minimum Stability Margins”. You can configure the step response also.

Step 7: Check the Final Compensator Values.
Under “Control and Estimation Tools Manager”, click on the “Compensator Editor” tab to see the compensator values.
